网络流学习笔记
网络流是一个图论中很大的知识点,这里只涉及部分内容。本篇只涉及最大流、最小割和费用流的相关知识。
概念
一张有向图 \(G = (V, E)\),对于每条边 \((u, v) \in E\) 都有一个权值 \(c(u, v) > 0\),称为边的 容量。且对于图上没有的边 \((u, v) \notin E\),\(c(u, v) = 0\),则这张图叫做一个 网络,图中有两个特殊的点 \(s \in V\) 和 \(t \in V\),这两个点称为 源点 和 汇点。
我们设 \(f(u, v)\) 是一个两个自变量均为节点(\(u \in V, v \in V\))的函数,且满足下列性质:
- \(f(u, v) \le c(u, v)\)(容量限制)
- \(f(u, v) = -f(v, u)\)(斜对称)
- \(\forall u \in \complement_V\{s, t\}, \sum_{(u, x) \in E}{f(u, x)} = \sum_{(x, v) \in E}{f(x, v)}\)(流量守恒)
则我们称 \(f(u, v)\) 为网络的 流函数。对于 \((u, v) \in E\),\(f(u, v)\) 称为这条边的 流量。\(c(u, v) - f(u, v)\) 称为这条边的 剩余流量。\(\sum_{(s, u) \in E}{f(s, u)}\) 则被称为整个网络的流量。
像下图就是一张网络。在边上标记的数字为 \(f(u, v) / c(u, v)\)。
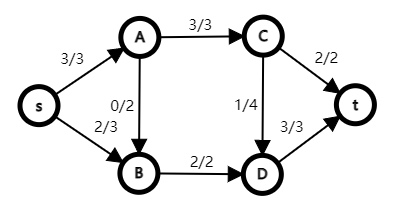
通过流函数性质我们可以发现:除了源点和汇点外,任何节点都不储存流,且流入总量等于流出总量。于是可以形象化地表述为:在不超过容量限制地前提下,流从源点经过网络流向汇点。
最大流
我们把拥有最大流量的网络流称为最大流,即为 \(\sum_{(s, u) \in E}{f(s, u)}\) 最大化。如《概念》上图所示。解决最大流问题最常用 Edmonds-Karp 和 Dinic 两种算法。
Edmonds-Karp 增广路算法(EK 算法)
在介绍 EK 算法前,我们需要先了解增广路。
在原图 \(G\) 中若一条从源点到汇点的路径上所有边的剩余容量都大于 \(0\),这条路被称为 增广路。
EK 算法则是不停地使用 BFS 算法求出增广路,然后扩大该路的流量,将流量计入答案。直至网络中不存在增广路为止。
方法是每次从源点开始 BFS,寻找 \(f(u, v) < c(u, v)\) 的边,任意找到一条从 \(s\) 到 \(t\) 的路径,同时存储最小剩余容量 \(\text{minF}\),于是网络流量可增加 \(\text{minF}\)。
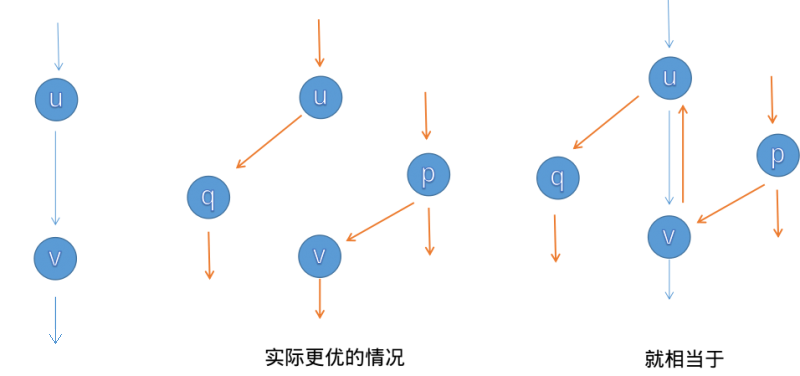
同时注意由于斜对称性质,需要给每条边加反流量,即 \(f(v, u) = -f(u, v)\)。加反边可利用流函数的特性找到更优的增广路,找到多条增广路来抵消不优的增广路,从而得到最优的增广路。形象化地话就看下图(图片引用自 OI Wiki):
这种算法的最差时间复杂度为 \(O(nm^2)\)。
然而直接求最大流问题,用得最多,且相对高效的算法是 Dinic 算法。
Dinic 算法
每次 BFS 只找一条增广路属实浪费,于是衍生出来了 Dinic 算法。
我们需要直到一个概念:在任意时刻,网络中所有节点以及剩余容量大于 \(0\) 的边组成的子图叫做 残量网络。
Dinic 算法的核心就是通过 BFS 构建出的 分层图,然后使用 DFS 在分层图上找增广路,在回溯时实时更新流量,直到找不到增广路为止。最后再使用 BFS 构建分层图,如此往复,直到构建不出分层图即得出答案。
Dinic 可进行当前弧优化。即对于每个点,它的某个出边在增广后就没用了。于是我们在下一次 DFS 的时候就可以直接从下一条边遍历即可。
代码实现如下:
1 | struct Node { |
使用最大流算法也可以解决二分图最大匹配问题。设二分图的两个独立点集 \(A\)、\(B\),我们只需要将源点向 \(A\) 中的点连接容量为 \(1\) 的边,将 \(B\) 中的点向汇点连接容量为 \(1\) 的边,同时将 \(A\)、\(B\) 之间的边容量设为 \(+\infty\)。最后跑一遍 Dinic 得到的结果即为最大匹配数。
Dinic 的时间复杂度为 \(O(n^2m)\),处理二分图最大匹配时复杂度甚至可达
\(O(m \sqrt{n})\)
吊打匈牙利算法,是一种非常高效的算法。
最小割
对于一个网络 \(G = (V, E)\),源点和汇点分别为 \(s\) 与 \(t\)。若有一边集 \(E' \subseteq E\) 且这张图删掉 \(E'\) 后 \(s\) 与 \(t\) 将不连通,则称 \(E'\) 为这个网络的 割。边的容量总和最小的割则称为这个网络的 最小割。
最小割有一个很重要的定理:任何一个网络中的最大流量等于最小割中边的容量之和,即“最大流 \(=\) 最小割”。这称之为最大流最小割定理。
证明:我们假设“最小割 \(<\) 最大流”,则删掉最小割中的边后,由于网络流量未最大化,我们仍然能找到一条从 \(s\) 到 \(t\) 的增广路,故假设不成立。于是满足“最小割 \(\ge\) 最大流”。而删去最大流后在残量网络中我们无法找到从 \(s\) 到 \(t\) 的增广路,于是我们可以推断“最小割 \(=\) 最大流”。
于是我们就可直接使用 EK 或 Dinic 求最小割。
费用流
在一个网络中,每条边不止有一个容量 \(c(u, v)\),还拥有一个给定的费用 \(w(u, v)\)。若边 \((u, v)\) 通过时流量为 \(f(u, v)\),则花费的费用为 \(f(u, v) \times w(u, v)\)。这种网络中的最大流的最小总花费为 最小花费最大流,最大流的最大总花费为 最大花费最大流,两者统称为 费用流 模型。当然费用流的前提是最大流。
像是二分图带权最大匹配这种问题,就可使用最大费用最大流解决。
求解费用流常见使用 Edmonds-Karp 增广路算法。
Edmonds-Karp 增广路算法(EK 算法)
我们只需要在 EK 算法求最大流的算法中改动一个点即可求费用流。就是将“使用 BFS 求增广路”改为“使用 SPFA 求费用和最小的增广路”即可,即把 \(w(u, v)\) 当作边权跑最短路,找到增广路后将该路径的费用计入答案。注意由于斜对称,对于一条边的边权为 \(w(u, v)\),我们同样要把反边的边权设为 \(w(v, u) = -w(u, v)\)。
这里列举了最小花费最大流的代码:
1 | struct Node { |